|
|
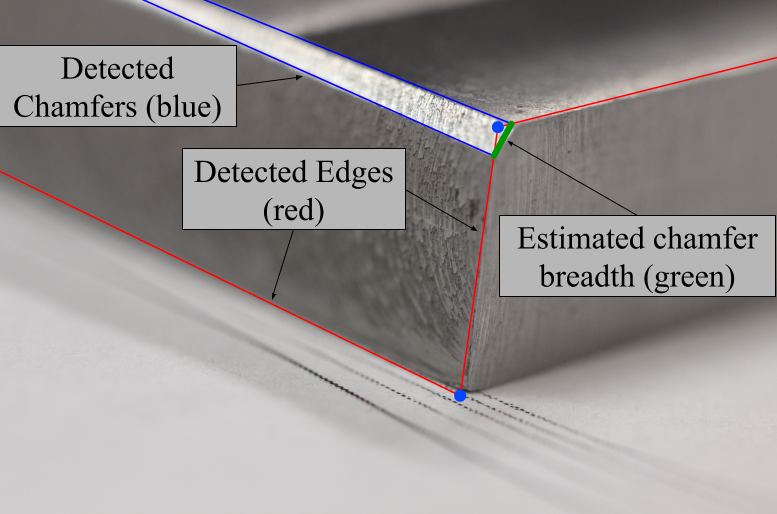
Vision based Edge Quality Control
Kartik Gupta, Cindy Grimm, Burak Sencer, and Ravi Balasubramanian
Designed a computer vision based system for high precision 6D pose estimation and evaluation of edge deburring quality (within 1-2 mm)
using an off-the-shelf camera for industrial application. The robustness and repeatability of the method are the
key challenges in the work. We published the work at MSEC 2020. I was scheduled to present the work at the conference. However, the
physical conference has been cancelled due to COVID-19.
|
|
|
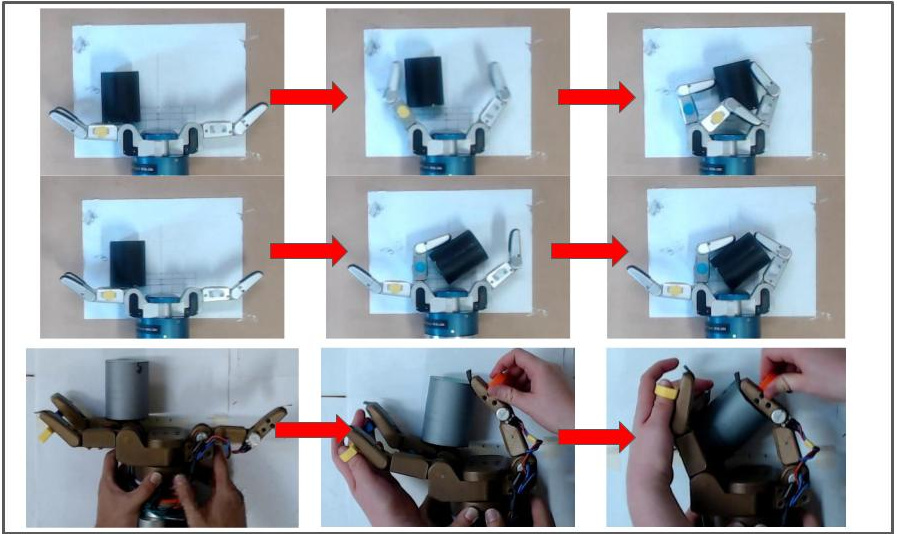
Pose Tracking for Grasping Experiments
I developed the computer vision pose tracking system to be able to perform grasping experiments. I was exposed to the robustness requirements
of real life computer vision system. I also learned about grasping, its difficulties and strategies as I performed the experiments with
the co-authors. We published the work in the International Conference on Intelligent Robots and Systems(IROS) 2019 [Report]
|
|
|
Autonomous Ground Vehicle (AGV) Navigation in Orchards
Guide: Dr. Vason Srini, Executive Director, DataFlux Systems Inc., Berkeley, CA
I worked on autonomous generation of a navigational path across the orchards using aerial data obtained with the help of GoogleEarth images, for Autonomous Ground Vehicles (AGV) to be used in orchards. Implemented Canny Edge Detection and Contour Analysis to identify and classify the trees and obstructions. Performed noise filtration, least-squared error analysis and regression method to estimate the rows of trees. Further, I Incorporated Bezier curves created
using Controlled Random Search algorithm with C2 continuity to allow for high speeds at turns. This entire processing pipeline was developed as a ROS node
which was incorporated with the navigation system of the AGV. The process achieved upto 95% accuracy in path generation and was robust to wide density of tree growth. [Report]
|
|
|
Task Allocation in Multiagent Robotic Systems in a Warehouse
We propose a distributed approach
in warehouse task allocation in which the multiagent system
use an evolutionary algorithm to exploit the best policies and
efficiently select tasks to complete in a warehouse simulation.
We use Cooperative Co-Evolutionary Algorithm with Hall of
Fame and Difference Evaluation to train the multiagent system
and compare its performance with a centralized approach commonly
used in most autonomous warehouses. We show that the
performance of the distributed system greatly outperforms the
centralized approach in allocating tasks.
[Presentation]
[Report]
|
|
|
Multi-Scale Frame Interpolation
Proposed improving upon Nvidia’s SuperSloMo usingcoarse-to-fineimage generation with stage-wise train-ing and
achieved competitive results. We also experimented with adding a GAN for further image refinement.
[Presentation]
[Report]
|
|
|
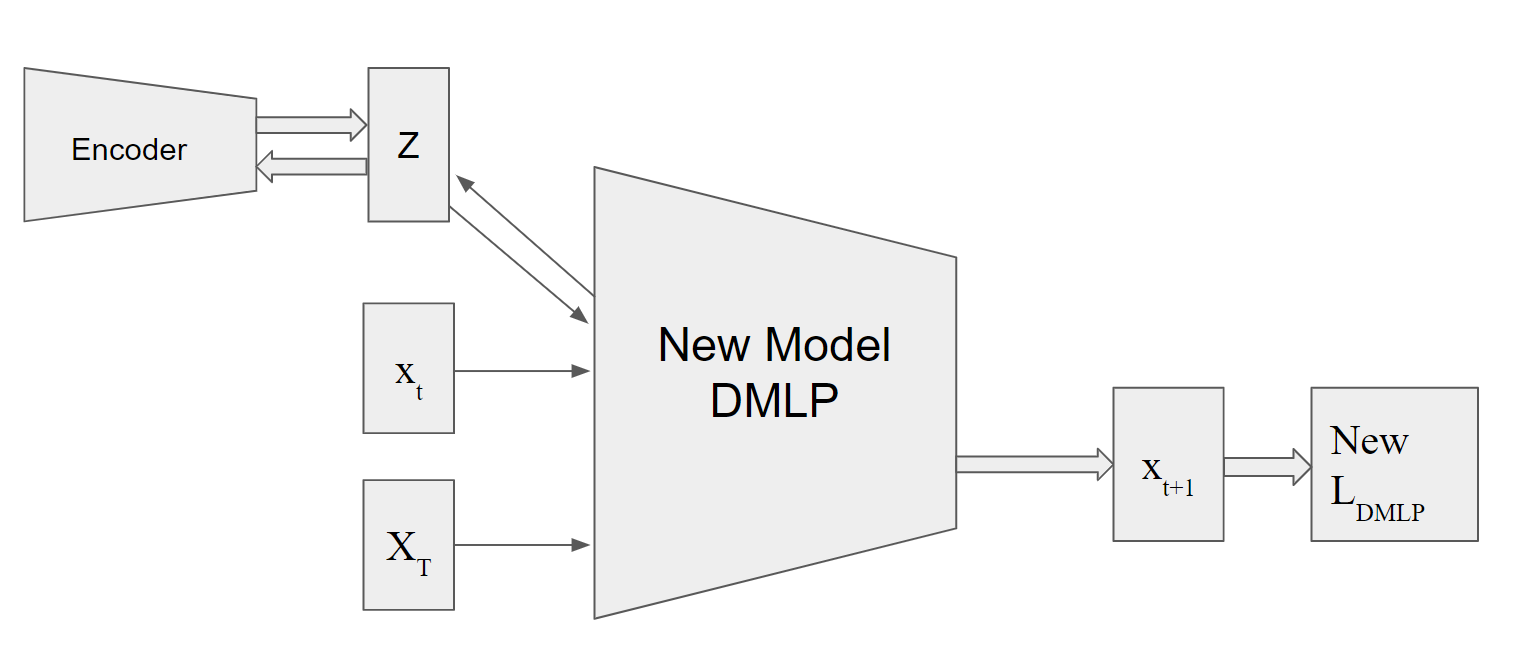
Benchmarking Motion Planning Networks
Incorporatedend-to-end learningfor contractive auto encoders with MPNet achieving10%improvement.
Extended MPNet for trajectory planning for 7DOF robot arm achieving faster planning compared to RRT*.
[Report]
|
|
|
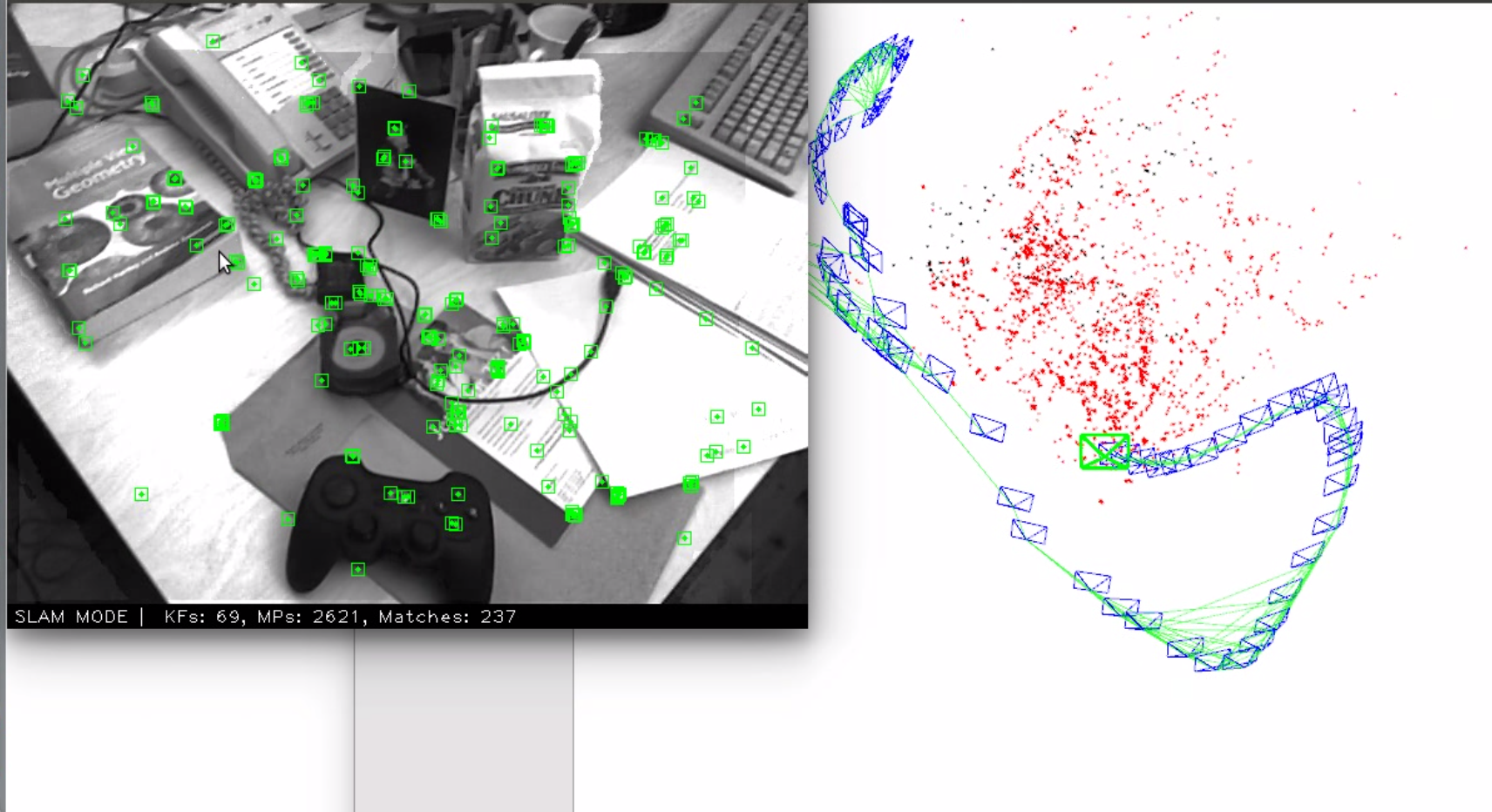
SLAM in Reduced Vision
Kartik Gupta, Ankit Pensia, Ramavtar Malav
Guide : Prof. Gaurav Pandey, Dept of Electrical Engineering, IIT Kanpur
We worked to improve the accuracy of monocular SLAM in presence of smoke and fog using image processing technique of Single Image Dehazing using Dark Channel Prior by He et al. Dehazing enables us to increase scene visibility and extract seemingly invisible visual detail. Evaluation of results showed 450% increase in keyframe selection, over a wide range of fog density. [Report]
|